article detail
노타, 퀄컴 피지컬AI 핵심 VLA 최적화 성공…로봇 동작 생성 속도 7배 향상
2026. 5. 29. 오전 8:37

AI 요약
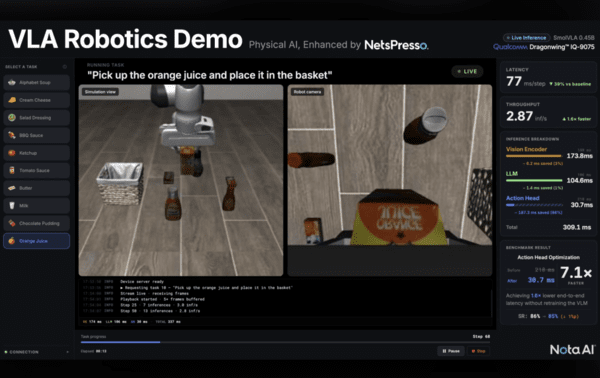
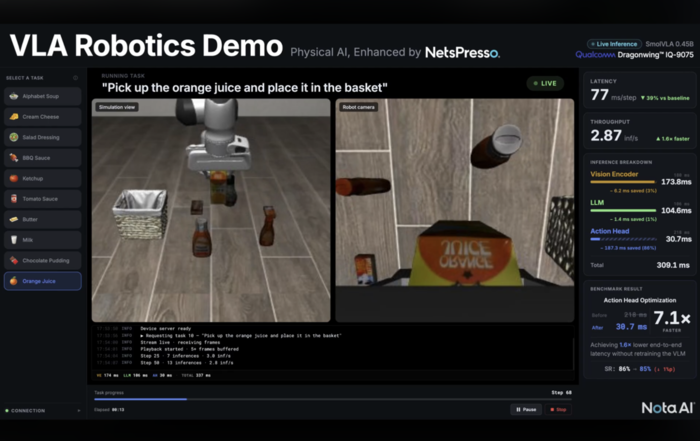
노타는 퀄컴 드래곤윙 IQ-9075 환경에서 VLA 모델 스몰VLA 0.45B를 자체 구동 환경으로 구현하고 로봇 동작 생성 단계 중심의 실시간 추론 최적화와 NPU 기반 그래프 최적화를 적용했다고 28일 밝혔습니다. 그 결과 로봇 동작 생성 모듈 처리 시간은 218ms에서 31ms로 약 85.8% 감소해 최대 7배 수준의 속도 개선을 달성했고 전체 추론 시간은 505ms에서 310ms로 단축되었으며 작업 성공률은 86%에서 85% 수준을 유지했습니다. 노타는 이 성과를 임베디드 비전 서밋 2026(미국 산타클라라)에서 시연해 관람객이 물품을 선택하면 최적화된 VLA 모델이 인식·동작을 생성해 로봇팔이 물품을 집어 바구니에 넣는 과정을 실시간으로 보여주었습니다.







![[SLM①] “맞춤형 소형언어모델로 기업 AI 장벽 허문다”](https://cdn.datanet.co.kr/news/thumbnail/202605/211529_135657_5126_v150.jpg)
![[AI&빅데이터쇼] 에딘트, 스마트폰서 구동하는 '온디바이스 비전 AI' 공개한다](https://cdn.aitimes.com/news/photo/202605/210236_212839_2656.jpg)