article detail
GIST, 사람 물건 집는 과정 닮은 'AI 양팔 로봇 집기 기술' 개발…피지컬 AI 구현 기여
2026. 4. 9. 오전 8:44
AI 요약
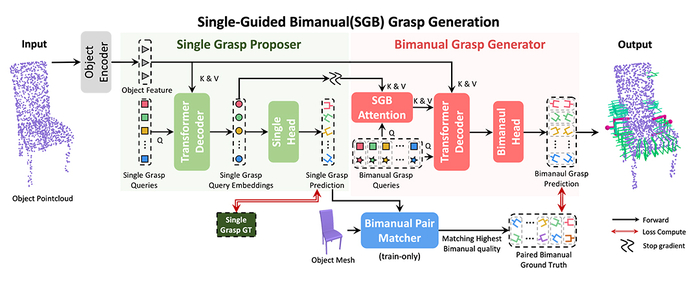
광주과학기술원(GIST) 이규빈 AI융합학과 교수팀이 사람처럼 두 팔을 함께 움직여 균형을 잡고 물체를 안정적으로 집는 '양팔 파지 로봇 시스템(BiGraspFormer)'을 개발했다고 9일 밝혔습니다. 이 시스템은 엔드 투 엔드 방식으로 포인트 클라우드 인식, 한쪽 팔 기준의 안정 위치 탐색을 통한 조합 생성, 두 팔의 간섭 방지 및 힘 균형을 고려한 최적 조합 선택의 세 단계로 작동하며, 가상 실험 100개 물체에서 89.67%의 파지 성공률(기존보다 약 18%p 향상)과 외부 충격 조건에서 59.72%의 성공률(약 23%p 향상)을 보였습니다. 연구팀은 추가 학습 없이 실제 로봇에 적용해 다양한 실제 물체에서 평균 88% 이상의 파지 성공률을 달성해 현장 적용 가능성과 범용성, 안정성을 입증했으며, 이규빈 교수는 이번 연구가 가구 운반·물류 창고 자동화·제조 현장 등에서 양팔 로봇의 실용화를 앞당길 것으로 기대한다고 말했습니다.

![[AI 엑스포 2026-②] 피지컬 AI, 현장 투입 본격화…기술 완성도는 과제](https://cdn.epnc.co.kr/news/photo/202605/401558_401629_4113.jpg)








![[보도자료]두산밥캣, 마음AI와 손잡고 건설장비 자율작업 기술 고도화 나선다](https://www.doosannewsroom.com/wp-content/uploads/2026/05/20260602-두산밥캣-마음AI-MOU-672x372.jpg)
